
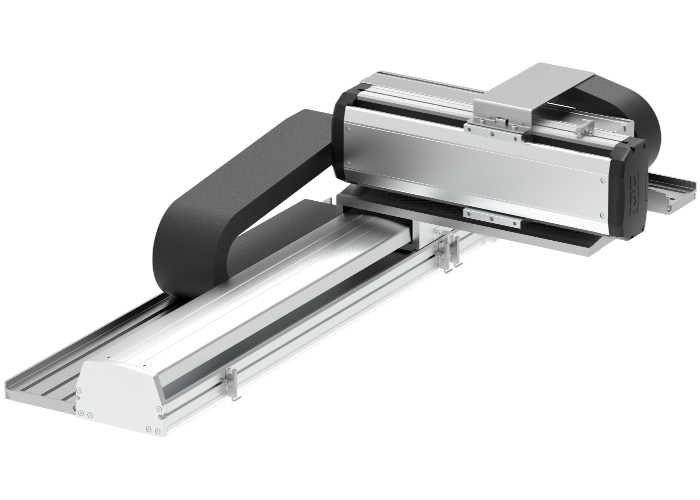
Belt Type Cartesian robot
Cartesian robots are a design of 2 and 3 axis multi-axis actuator through the multiple combinations of single axis actuators. It maximizes the applications possibility of movement and minimizes the time of assembly. Also, can keep consistency of the appearance. XYTB series of cartesian robot is a combination of two or more belt type actuators. Belt and pulley system to convert electrical energy into mechanical motion. It provides compact design with high power density. It is suitable for a wide range of applications, including industrial automation, robotics, and medical devices.
Features
- Low cost compares to vertical joints robot
- Ingenious mechanical design making
- Cartesian robots achieve high rigidity for reducing vibration and deformation
- Multiple combination of single axis actuator
- Resistance to dirt and debris
Applications
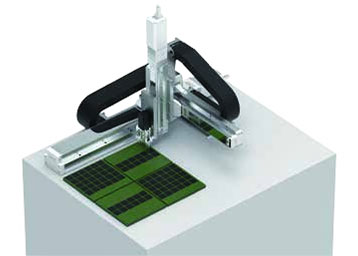
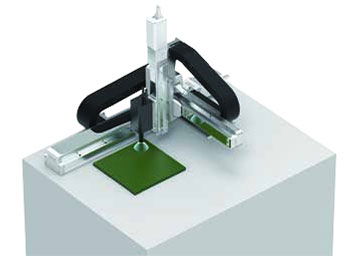
Pick and Place for Small Sized Pieces
Pick and place for small parts using a single axis sliding table with a 3 axis linear system.
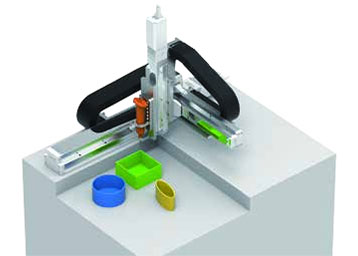
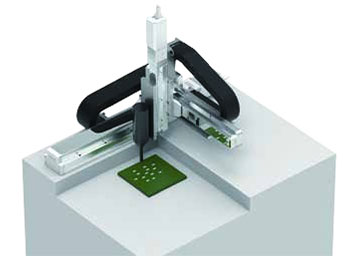
Dispensing for Small Sized Workpieces
A cost competitive solution for dispensing applications both on and off the production line.
Surface Treatment
Cartesian system is suitable for cleaning surface treatment applications
Screw Tightening
Desktop Robot is suitable for pick and place and tightening of screw and bolts.
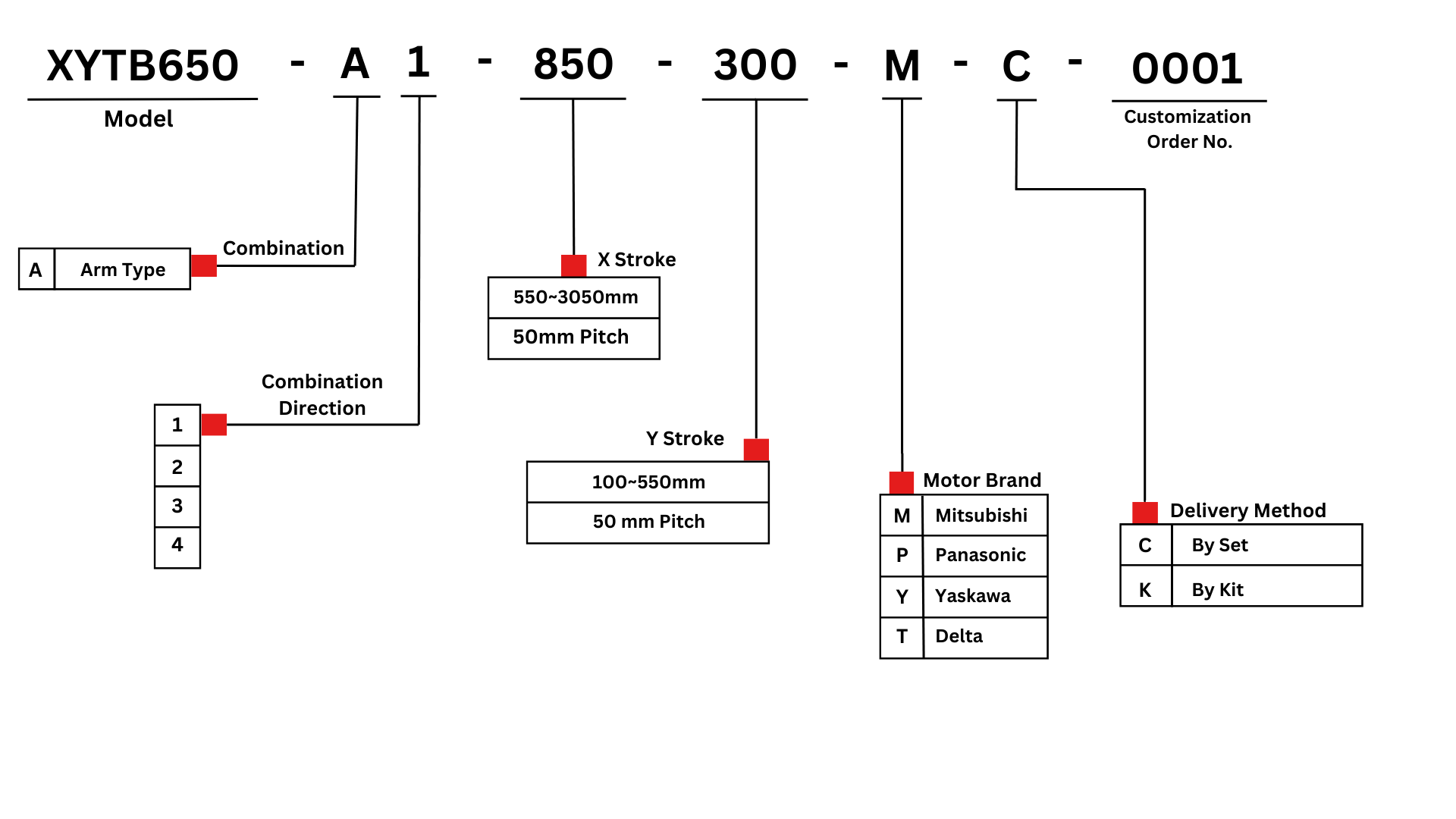
XYTB650-A series
XYTB650-A series specification
| ITEM | X AXIS | Y AXIS |
|---|---|---|
| Model Type | ETB14M | ETH13 |
| Repeatability (mm) | ±0.04 | ±0.005 |
| Lead (mm) | 40 | 20 |
| Maximum Speed (mm/s)*2 | 2400 | 1200 |
| Stroke 50 mm Pitch(mm) | 550~3050 | 100~550 |
| AC Servo Motor Output (w) | 200 | 200 |
| Environment | 0~40°C .85% R H Below | |
Maximum speed is based on AC servo motors 3600RPM
| Maximum Payload | |||||
|---|---|---|---|---|---|
| Y Stroke (mm) | 150 | 250 | 350 | 450 | 550 |
| Y Payload(kg) | 14 | 12 | 10 | 8 | 7 |
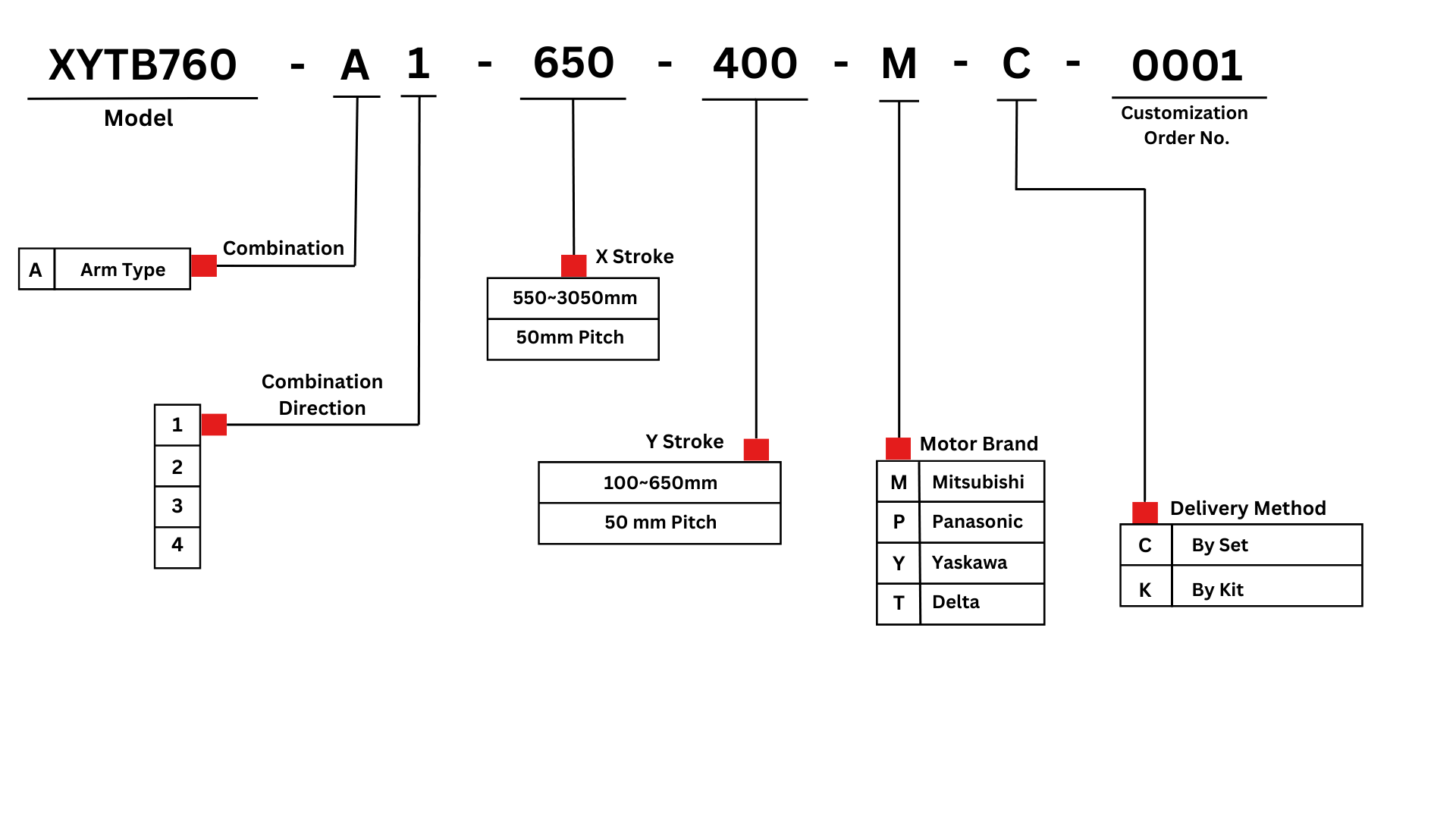
XYTB760-A series
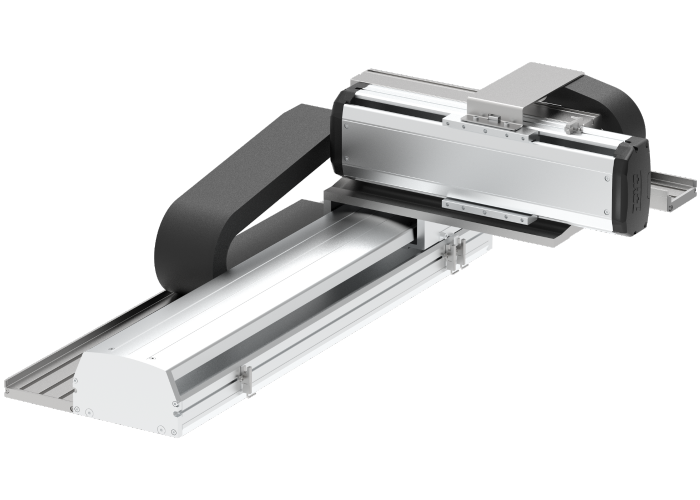
XYTB760-A series specification
| ITEM | X AXIS | Y AXIS |
|---|---|---|
| Model Type | ETB17M | ETH14 |
| Repeatability (mm) | ±0.04 | ±0.005 |
| Lead (mm) | 40 | 20 |
| Maximum Speed (mm/s)*2 | 2400 | 1200 |
| Stroke 50 mm Pitch(mm) | 550~3050 | 100~650 |
| AC Servo Motor Output (w) | 400 | 200 |
| Environment | 0~40°C .85% R H Below | |
Maximum speed is based on AC servo motors 3000RPM
| Maximum Payload | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Y Stroke (mm) | 150 | 250 | 350 | 450 | 550 | 650 | |||
| Y Payload(kg) | 30 | 28 | 26 | 24 | 22 | 20 | |||
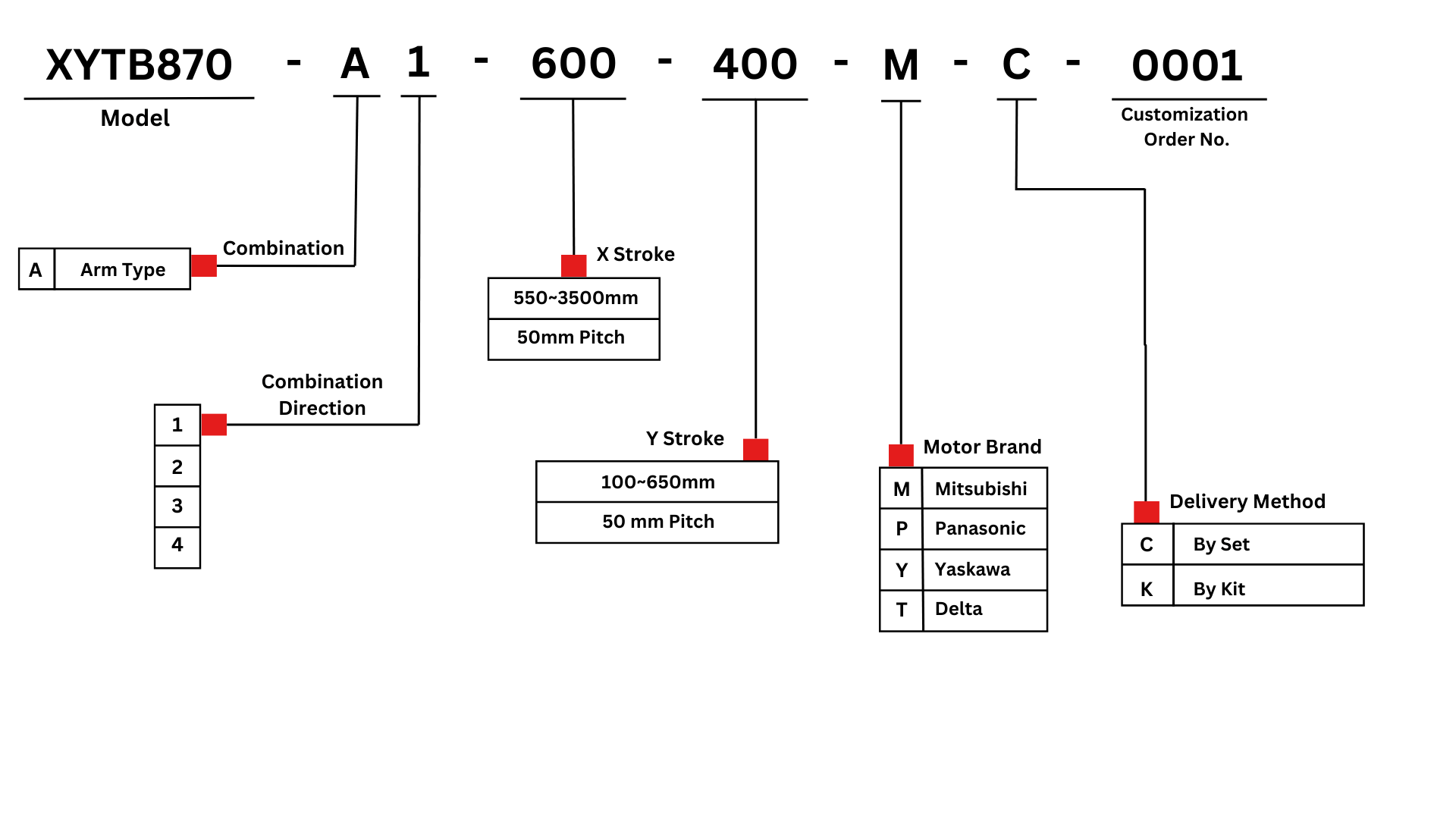
XYTB-870 series
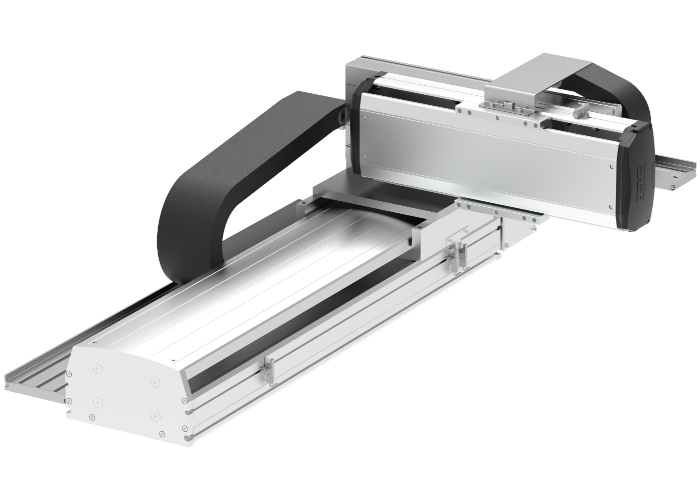
XYTB870-A series specification
| ITEM | X AXIS | Y AXIS | ||
|---|---|---|---|---|
| Model Type | ETB22M | ETH17 | ||
| Repeatability (mm) | ±0.04 | ±0.005 | ||
| Lead (mm) | 40 | 20 | ||
| Maximum Speed (mm/s)*2 | 2400 | 1200 | ||
| Stroke 50 mm Pitch(mm) | 50~3500 | 100~650 | ||
| AC Servo Motor Output (w) | 750 | 400 | ||
| Environment | 0~40°C .85% R H Below | |||
Maximum speed is based on AC servo motors 3000RPM
| Maximum Payload | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Y Stroke (mm) | 150 | 250 | 350 | 450 | 550 | 650 | ||||||
| Y Payload(kg) | 50 | 45 | 40 | 35 | 30 | 25 | ||||||
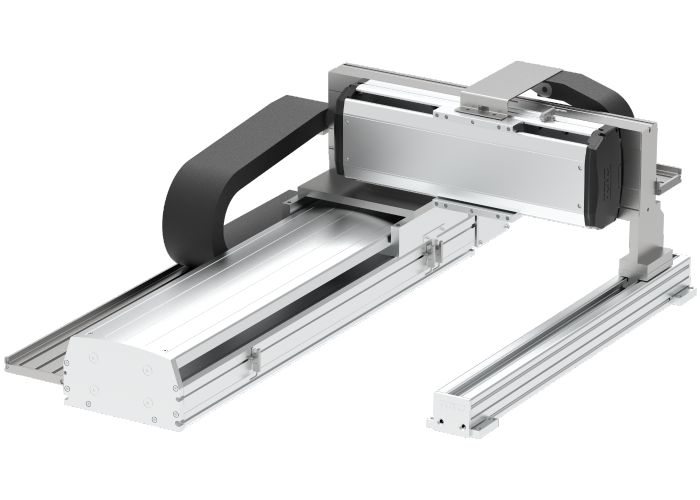
XYTB876-A series

XYTB876-A series specification
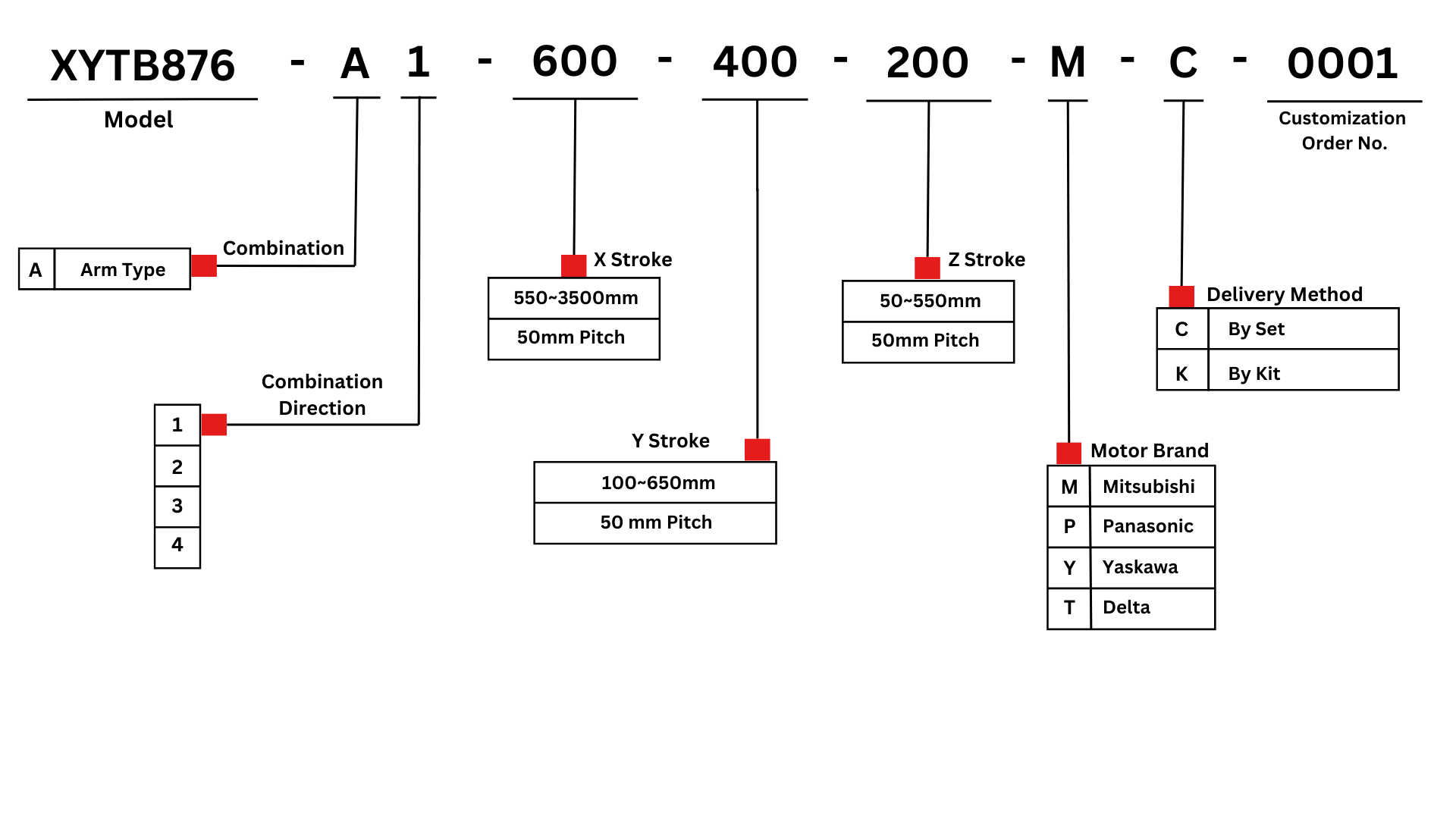
| ITEM | X AXIS | Y AXIS | Z AXIS |
|---|---|---|---|
| Model Type | ETB22M | ETH17 | ETH14 |
| Repeatability (mm) | ±0.04 | ±0.005 | ±0.005 |
| Lead (mm) | 40 | 20 | 10 |
| Maximum Speed (mm/s)*3 | 2000 | 1000 | 500 |
| Stroke 50 mm Pitch(mm) | 500~3500 | 100~750 | 50~550 |
| AC Servo Motor Output (w) | 750 | 400 | 400+Brake |
| Environment | 0~40°C .85% R H Below | ||
Maximum speed is based on AC servo motors 3000RPM
| Maximum Payload | |||||||
|---|---|---|---|---|---|---|---|
| Y stroke mm / Z Stroke |
150 | 250 | 350 | 450 | 550 | 650 | |
| 22 | 22 | 22 | 22 | 19 | 18 | ||
| 22 | 22 | 22 | 20 | 18 | 17 | ||
| 22 | 22 | 22 | 20 | 17 | 16 | ||
| 22 | 22 | 22 | 19 | 16 | 15 | ||
| 22 | 22 | 22 | 19 | 16 | 14 | ||
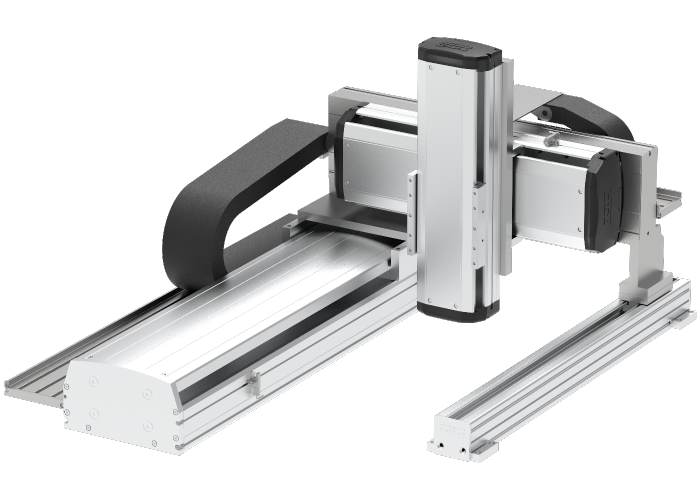
XYTB870-G series
XYTB870-G series specification
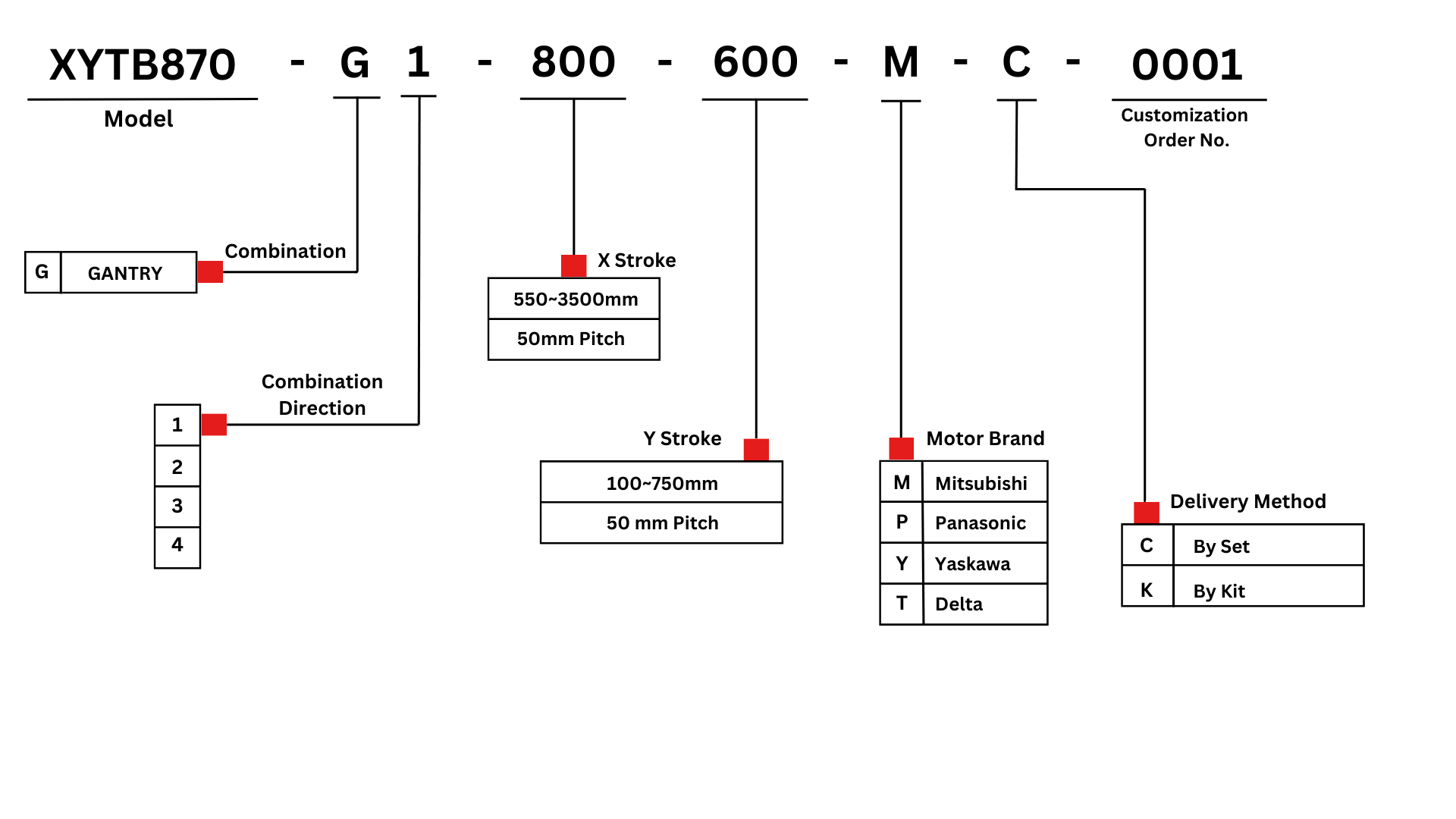
| ITEM | X AXIS | Y AXIS | |
|---|---|---|---|
| Model Type | ETB22M | ETH17 | |
| Repeatability (mm) | ±0.04 | ±0.005 | |
| Ball Screw Lead (mm) | 40 | 20 | |
| Maximum Speed (mm/s)*1 | 2400 | 1200 | |
| Stroke 50 mm Pitch(mm) | 550~3500 | 100~750 | |
| AC Servo Motor Output (w) | 750 | 400 | |
| Environment | 0~40°C .85% R H Below | ||
Maximum speed is based on AC servo motors 3000RPM
| Maximum Payload | ||
|---|---|---|
| Y stroke (mm) | 100~750 | |
| Y payload(kg) | 50 | |
XYTB876-G series
XYTB876-G series specification
| ITEM | X AXIS | Y AXIS | Z AXIS |
|---|---|---|---|
| Model Type | ETB22M | ETH17 | ETH14 |
| Repeatability (mm) | ±0.04 | ±0.005 | ±0.005 |
| Lead (mm) | 40 | 20 | 10 |
| Maximum Speed (mm/s)*1 | 2400 | 1200 | 600 |
| Stroke 50 mm Pitch(mm) | 550~3500 | 100~750 | 50~550 |
| AC Servo Motor Output (w) | 750 | 400 | 400+Brake |
| Environment | 0~40°C .85% R H Below | ||
Maximum speed is based on AC servo motors 3000RPM
| Maximum Payload | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Y stroke mm / Z Stroke |
|||||||||||