

{kind=link}
Desktop robot
Desktop robots operate on a three-axis coordinate system similar to the cartesian coordinate system used in mathematics. The axes are typically labelled X, Y, and Z, representing horizontal, vertical, and depth movements respectively.
Each axis of a desktop robot is equipped with linear actuators or motors that allow precise linear motion along the respective axis. This motion can be controlled independently, enabling the robot to move in straight lines along each axis.
Desktop robots are controlled by a computerized control system that manages the motion of each axis based on programmed instructions.
Features
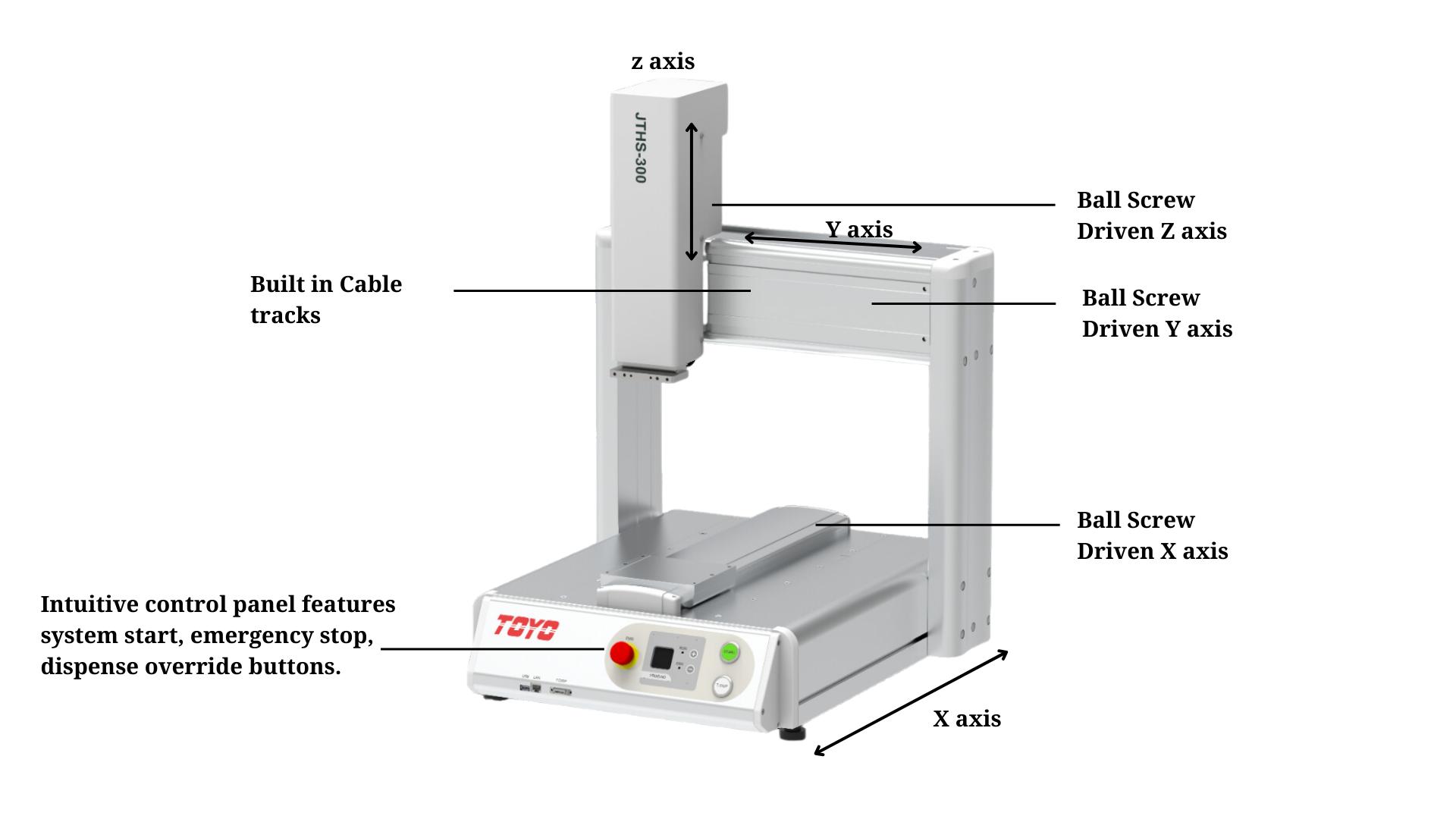
- Our fully ball screw driven desktop robots improve single and multi-axis positioning accuracy.
- The Z axis ball screw driven system improves overall system accuracy and reduces the chance of missed motor steps.
- TSC400 controller for controlling and programming the cartesian robot available, detail features mentioned in below table.
- Built in cable tracks improves safety and look
- No missed steps, high speed, high precision, for high speed and high load JTHS model preferred.
- XY axis cover prevents unwanted foreign object inclusion.
- LCD panel for easy recipe selection, emergency stop and dispense override buttons.
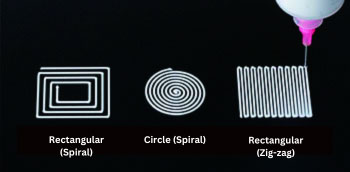
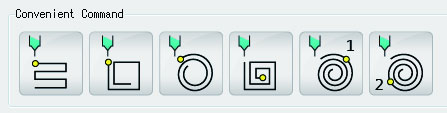
Dispensing Functions
Applications

Cutting (Machining)
Perform abstract cutting by placing the PCB on XY axis moving table and matching tool on the Z axis single linear actuator

Soldering
Equipped with an automatic soldering tool, place the PCB on the sliding table to fully automated soldering.
JTHC series

JTHC series specification
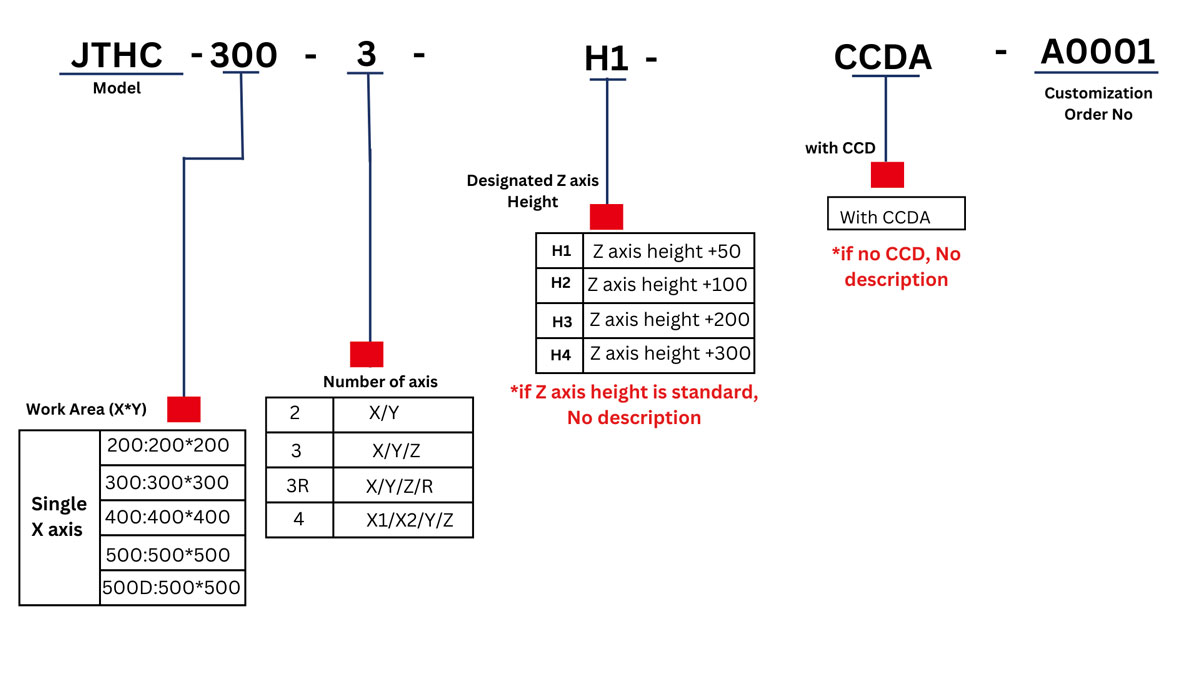
| ITEM | JTHC200 | JTHC300 | JTHC400 | JTHC500 | JTHC500D | ||
|---|---|---|---|---|---|---|---|
| Work Area | X*Y axis | mm | 200*200 | 300*300 | 400*400 | 500*500 | 500*500(Double X axis) |
| Z axis | mm | 100 | 100 | 100 | 100 | 100 | |
| Max. Payload | X axis | kg | 8 | 12 | 12 | 12 | 7(single axis) |
| Z axis | kg | 5 | 6 | 6 | 6 | 6 | |
| PTP Movement | X*Y axis | mm/s | 500 | 500 | 500 | 500 | 500 |
| Z axis | mm/s | 200 | 250 | 250 | 250 | 250 | |
| CP Movement | "X*Y*Z Combined Speed | ||||||
| mm/s | 400 | 400 | 400 | 400 | 400 | ||
| Repeatability | X*Y axis | mm | (+/- 0.01) | (+/- 0.01) | (+/- 0.01) | (+/- 0.01) | (+/- 0.01) |
| Z axis | mm | (+/- 0.01) | (+/- 0.01) | (+/- 0.01) | (+/- 0.01) | (+/- 0.01) | |
| ITEM | TSC400 Integrated Controller-driver Spec. | ||
|---|---|---|---|
| Drive Method | Closed loop stepper motor | ||
| Control Method | Point to point(PTP), Continuous path(CP) | ||
| Interpolation | 3 dimensional linear and arc interpolation | ||
| Teaching Method | Remote teaching (JOG)/Manual data input(MDI) | ||
| Teaching System | PC based UI: convert 2D CAD files to paths; import images for tracing | ||
| PAD based UI: teach position; edit programs | |||
| UI | Languages | Chinese(Traditional), English, Japanese | |
| Unit | mm | ||
| Programs Capacity | 100 program(1~100) | ||
| Data Capacity | Up to 100,000 points | ||
| Simple PLC function | 100 sets, Up to 1000 steps | ||
| External input/output | IO | 16 IN/16 OUT (NPN/PNP) | |
| LAN | Ethernet need to use under TOYO UI(Through the hub to devices) | ||
| COM | RS-232C(Supports peripheral device connections) | ||
| USB | Firmware updates, Procedure Import/Export | ||
| Power Source | AC 100~240, 5A | ||
JTHS series

JTHS series specification
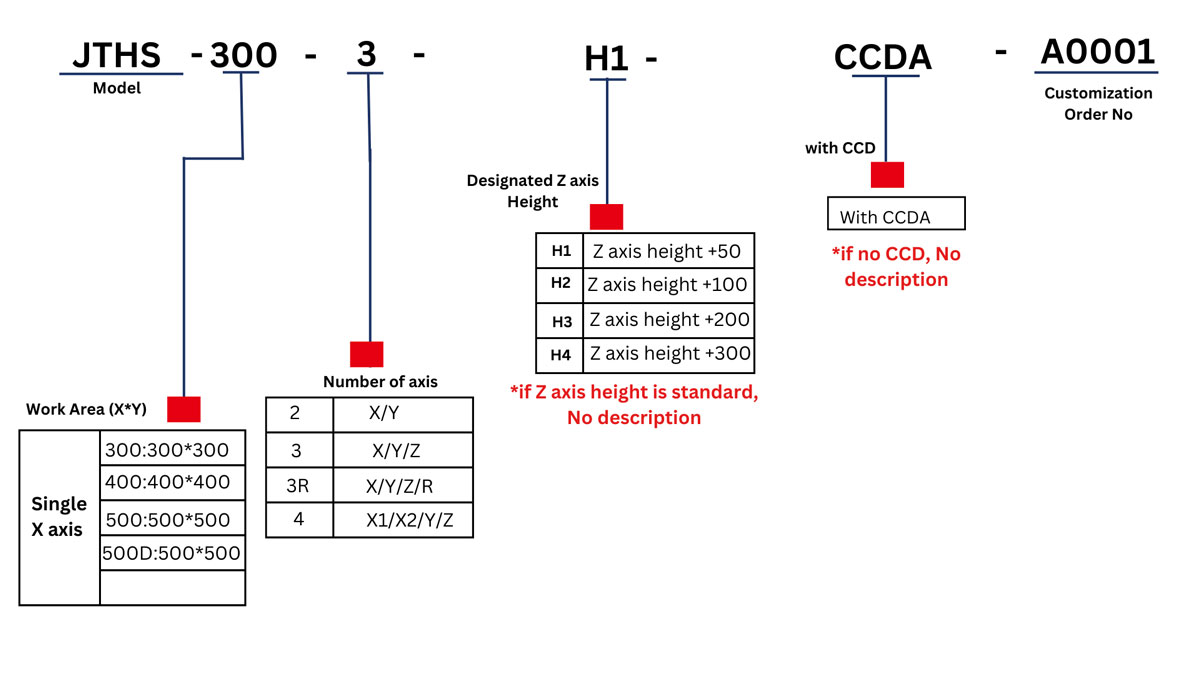
| ITEM | JTHS300 | JTHS400 | JTHS500 | JTHS500D | ||
|---|---|---|---|---|---|---|
| Work Area | X*Y axis | mm | 300*300 | 400*400 | 500*500 | 470*470 |
| Z axis | mm | 100 | 100 | 100 | 100 | |
| Max. Payload | X axis | kg | 15 | 15 | 15 | 15 |
| Z axis | kg | 8 | 8 | 8 | 8 | |
| PTP Movement | X*Y axis | mm/s | 1000 | 1000 | 1000 | 1200 |
| Z axis | mm/s | 500 | 500 | 500 | 500 | |
| CP Movement | "X*Y*Z Combined Speed | |||||
| mm/s | 900 | 900 | 900 | 1100 | ||
| Repeatability | X*Y axis | mm | (+/- 0.05) | (+/- 0.05) | (+/- 0.05) | (+/- 0.02) |
| Z axis | mm | (+/- 0.05) | (+/- 0.05) | (+/- 0.05) | (+/- 0.05) | |
| ITEM | TSC400 Integrated Controller-driver Spec. | ||
|---|---|---|---|
| Drive Method | Closed loop stepper motor | ||
| Control Method | Point to point(PTP), Continuous path(CP) | ||
| Interpolation | 3 dimensional linear and arc interpolation | ||
| Teaching Method | Remote teaching (JOG)/Manual data input(MDI) | ||
| Teaching System | PC based UI: convert 2D CAD files to paths; import images for tracing | ||
| PAD based UI: teach position; edit programs | |||
| UI | Languages | Chinese(Traditional), English, Japanese | |
| Unit | mm | ||
| Programs Capacity | 100 program(1~100) | ||
| Data Capacity | Up to 100,000 points | ||
| Simple PLC function | 100 sets, Up to 1000 steps | ||
| External input/output | IO | 16 IN/16 OUT (NPN/PNP) | |
| LAN | Ethernet need to use under TOYO UI(Through the hub to devices) | ||
| COM | RS-232C(Supports peripheral device connections) | ||
| USB | Firmware updates, Procedure Import/Export | ||
| Power Source | AC 100~240, 5A | ||