
Miniature Cylinder
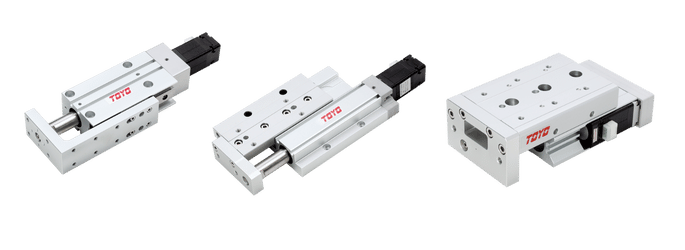
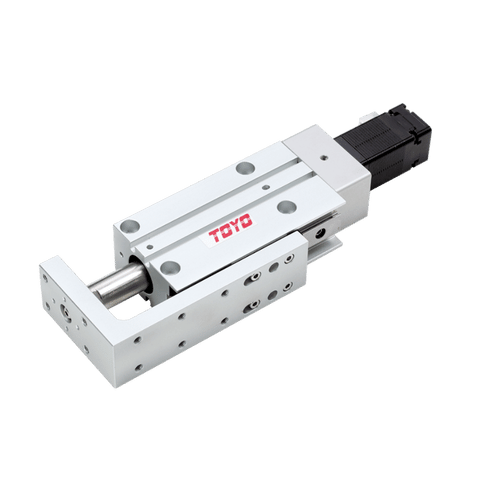
A miniature electric cylinder is a compact and versatile linear actuator that can move objects in a straight line with precision. CS series miniature cylinders are ball screw driven. It is commonly used in applications such as robotics, automation, 3D printing, and medical devices.
Miniature electric cylinders come in various sizes and force capabilities to suit different requirements. When choosing a miniature electric cylinder, consider factors such as stroke length, load capacity, speed, and control options.
Features
- Compact design, small size
- Easy to maintain
- Improved housing strength and smoothness.
- Higher accuracy and less noise than comparable pneumatic cylinders
- We have replaced the profile linear guide with an integrated linear bearing to achieve overall straightness of 士0.02 mm.
- Multiple control options available for optimal performance
- Control methods: IO, Pulse, Communication
Applications
Micro-positioning systems, Miniature robotics, Optical and photonics, Medical devices, Automated optical inspection (AOI) systems, Micro-manipulation and Micro-assembly, Miniature actuated grippers and End effectors
Industries
Industrial robot Industry, TFT display manufacturing, Semi-conductor manufacturing, LED manufacturing, Material handling industry, Lab automation, Nanotechnology
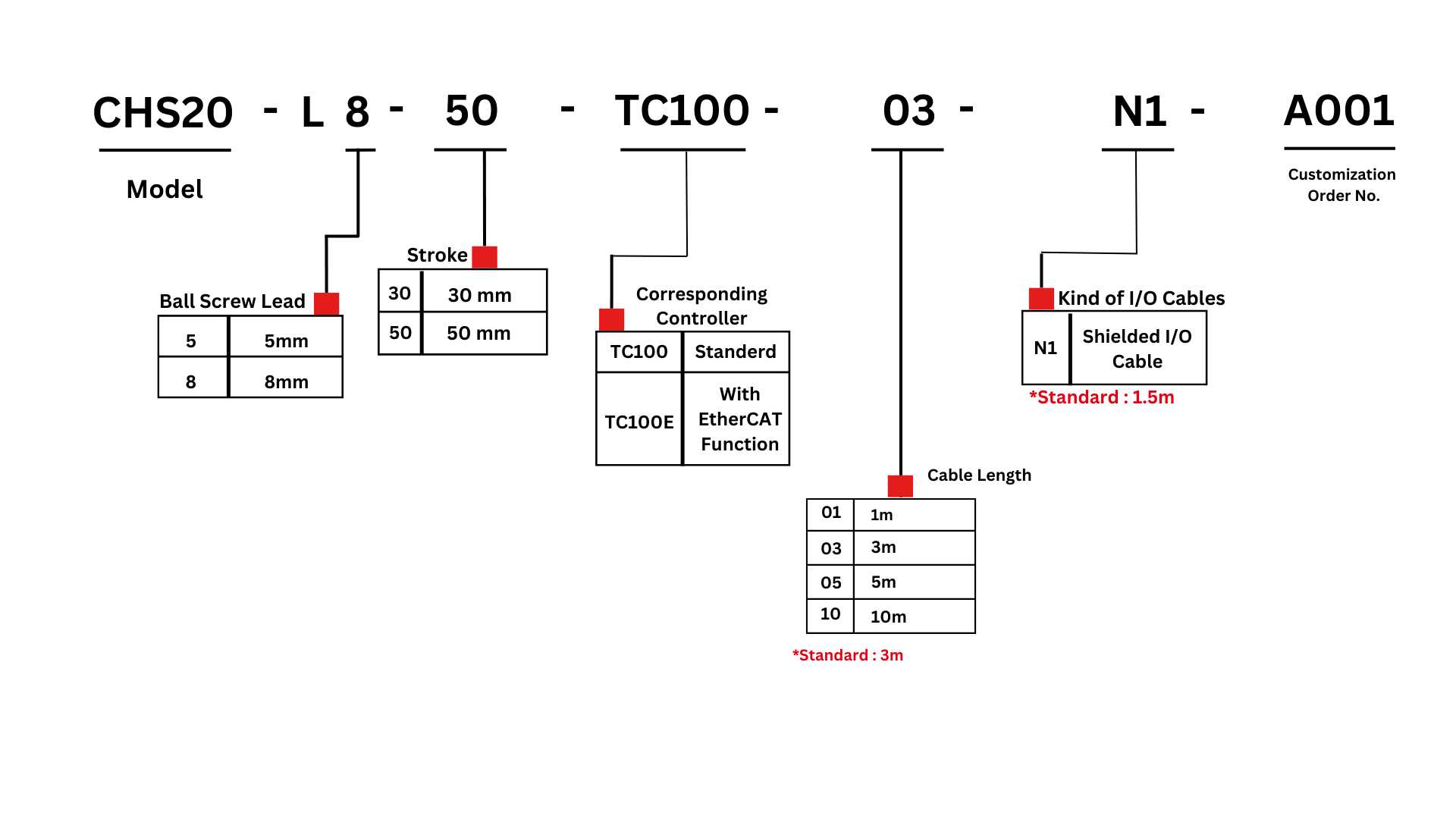
CSH20 series
CSH20 series specification
| Specification | Repeatability (mm) | +/-0.02 | ||
|---|---|---|---|---|
| Ball Screw Lead (mm) | 2 | 8 | ||
| Maximum Speed | ||||
| Horizontal (kg) | ≤50 | ≤165 | ||
| Vertical (kg) | ≤50 | ≤165 | ||
| Maximum Payload | Horizontal (kg) | ≤6 | ≤2 | |
| Vertical (kg) | ≤2 | ≤0.5 | ||
| Rated Thrust (N) | 244 | 56 | ||
| Stroke (increments) (mm) | 30/50 | |||
| Parts | Motor Dimension (mm) | 25□ | ||
| Ball Screw Spec | C10 Φ6mm | |||
| Corresponding Controller Chart | |||
|---|---|---|---|
| Controller Model | Features | Electrical Spec. | |
| TC100 | Pulse Control Mode | Line driver 200k Hz/Open Collector 60k Hz support line driver and open collector Max. pulse receiving speed 200k/60k Hz. |
The voltage of control circuit is 24V only. Operating voltage DC24V, rated current 2A, peak current 3A. Operating voltage:DC48V, rated current 1A, peak current 2A. when the voltage is DC48V but same torque, the rotation speed will be raised. |
| I/O Control Mode | By I/O control, max. 127 positioning points, can be executed | ||
| Communication Control Mode | With Modbus RS-485 or EtherCAT (connect over 16 axes in series) and USB module |
||
| (Optional)with EterCAT, connect over 16 axes can be in series | |||
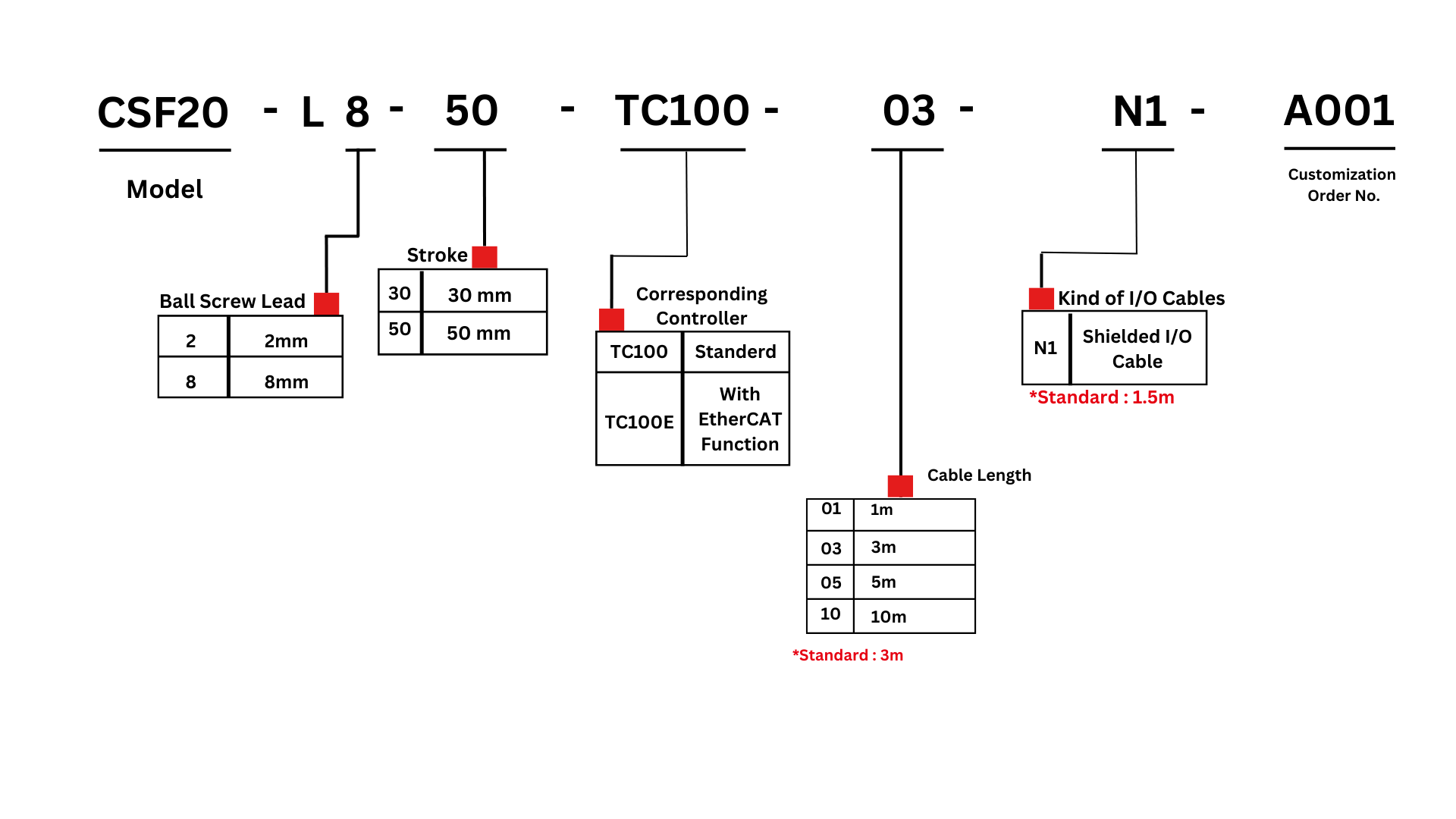
CSF20 series

CSF20 series specification
| Specification | Repeatability | mm | +/-0.02 | |
|---|---|---|---|---|
| Ball Screw Lead | mm | 2 | 8 | |
| Maximum Speed mm/s | ||||
| Horizontal (kg) | ≤50 | ≤165 | ||
| Vertical (kg) | ≤50 | ≤165 | ||
| Maximum Payload" | Horizontal (kg) | ≤6 | ≤2 | |
| Vertical (kg) | ≤2 | ≤0.5 | ||
| Rated Thrust (N) | 244 | 56 | ||
| Stroke (increments) (mm) | 30/50 | |||
| Parts | Motor Dimension (mm) | 25□ | ||
| Ball Screw Spec | C10 Φ6mm | |||
| Corresponding Controller Chart | |||
|---|---|---|---|
| Controller Model | Features | Electrical Spec. | |
| TC100 | Pulse Control Mode | Line driver 200k Hz/Open Collector 60k Hz support line driver and open collector Max. pulse receiving speed 200k/60k Hz. |
The voltage of control circuit is 24V only. Operating voltage DC24V, rated current 2A, peak current 3A. Operating voltage:DC48V, rated current 1A, peak current 2A. when the voltage is DC48V but same torque, the rotation speed will be raised. |
| I/O Control Mode | By I/O control, max. 127 positioning points, can be executed | ||
| Communication Control Mode | With Modbus RS-485 or EtherCAT (connect over 16 axes in series) and USB module |
||
| (Optional)with EterCAT, connect over 16 axes can be in series | |||
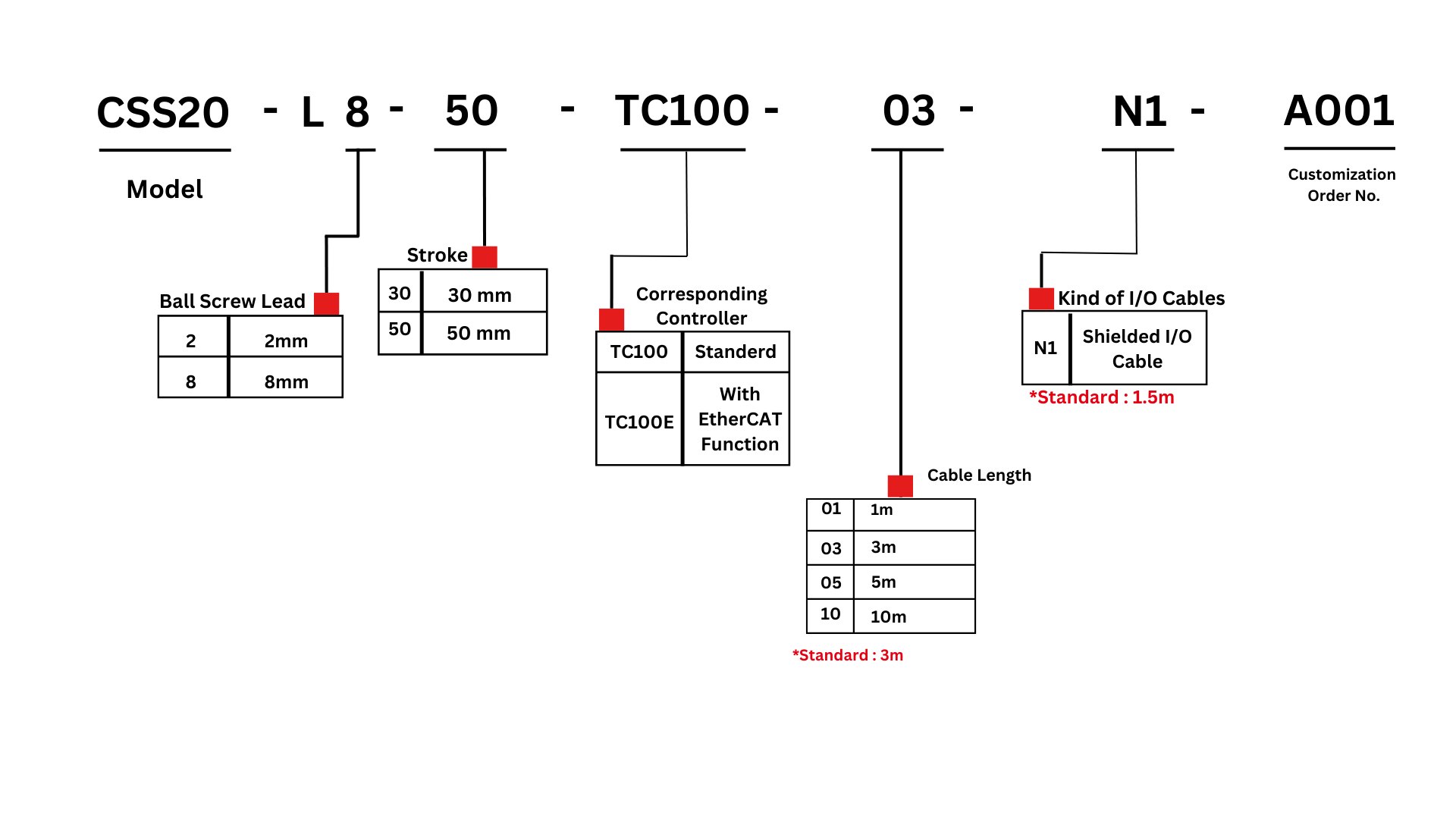
CSS20 series

CSS20 series specification
| Specification | Repeatability (mm) | mm | +/-0.02 | |
|---|---|---|---|---|
| Ball Screw Lead | mm | 2 | 8 | |
| Maximum Speed | ||||
| Horizontal (kg) | ≤50 | ≤165 | ||
| Vertical (kg) | ≤50 | ≤165 | ||
| Maximum Payload | Horizontal (kg) | ≤6 | ≤2 | |
| Vertical (kg) | ≤2 | ≤0.5 | ||
| Rated Thrust (N) | 244 | 56 | ||
| Stroke (increments) (mm) | 30/50 | |||
| Parts | Motor Dimension (mm) | 25□ | ||
| Ball Screw Spec | C10 Φ6mm | |||
| Corresponding Controller Chart | |||
|---|---|---|---|
| Controller Model | Features | Electrical Spec. | |
| TC100 | Pulse Control Mode | Line driver 200k Hz/Open Collector 60k Hz support line driver and open collector Max. pulse receiving speed 200k/60k Hz. |
The voltage of control circuit is 24V only. Operating voltage DC24V, rated current 2A, peak current 3A. Operating voltage:DC48V, rated current 1A, peak current 2A. when the voltage is DC48V but same torque, the rotation speed will be raised. |
| I/O Control Mode | By I/O control, max. 127 positioning points, can be executed | ||
| Communication Control Mode | With Modbus RS-485 or EtherCAT (connect over 16 axes in series) and USB module |
||
| (Optional)with EterCAT, connect over 16 axes can be in series | |||
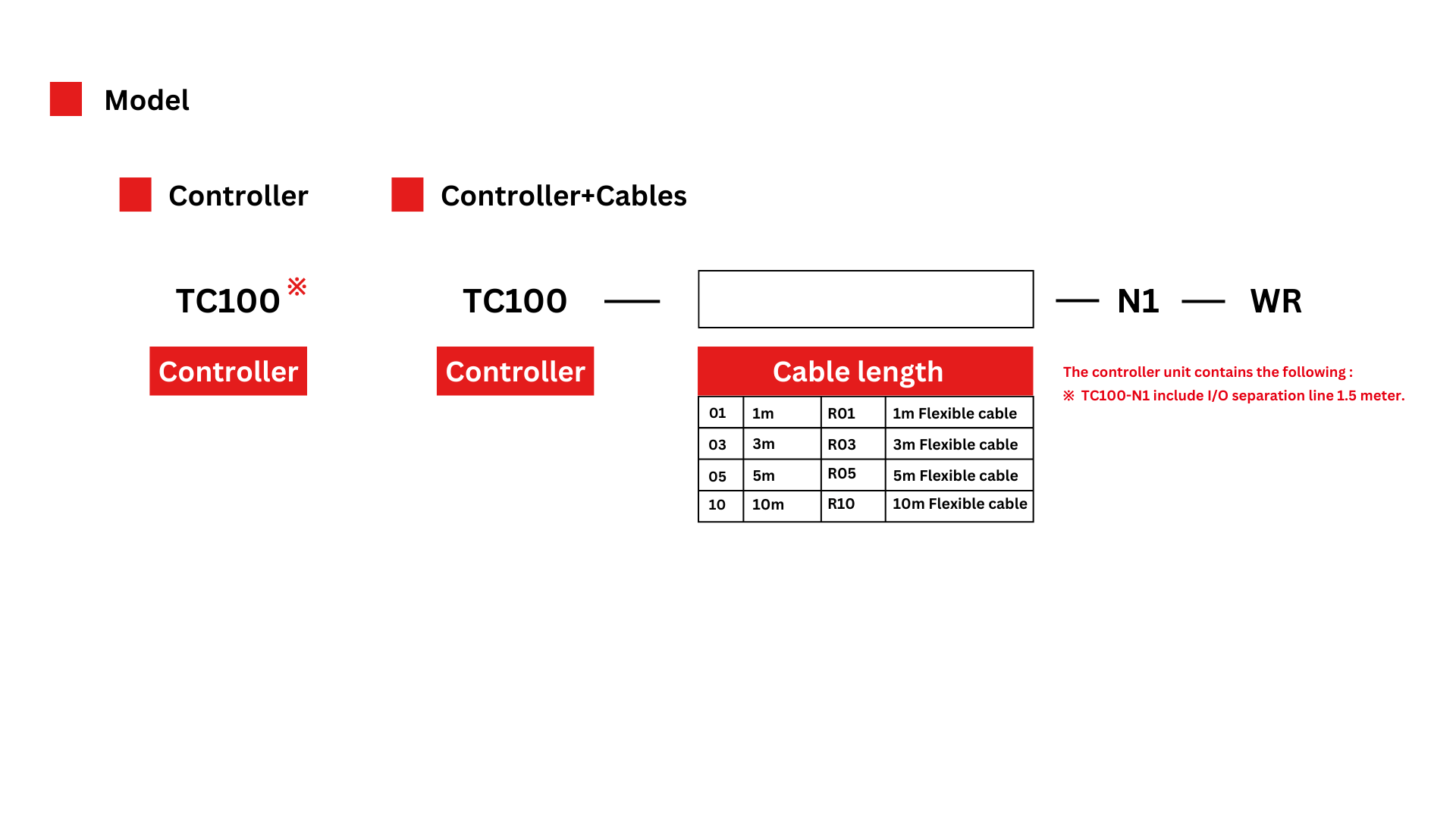
TC100

TC100 Controller specification
| ITEM | Specification | ||
|---|---|---|---|
| Input Power | Control Power | DC 24V(±10%) | |
| Power Supply | DC 24V(±10%)/DC 48V(±10%) | ||
| Number of Controlled Axis | 1 single axis | ||
| Motor | Appropriate Motor | Two phase stepping motor | |
| Dimension | 36` 42` 35` 25` 20 | ||
| Rated Output | 2Ao-p Peak value of sine wave current | ||
| Instant Maximum Output | 3Ao-p Peak value of sine wave current | ||
| Motion Control Mode | ABS Mode | ||
| INC Mode | |||
| INC-R Continuous Mode | |||
| ABS-R Continuous Mode | |||
| TSL Thurst Mode | |||
| Position | Total number of points | 1~127 points | |
| Position Setting Method | Communication setting point position | ||
| I/O point position teaching | |||
| Encoder | Position Mangement | Incremental | |
| Positiion Checking | Optical Rotary Encoder | ||
| Resolution | 16000ppr(56`42 angles)/12800ppr(35 angles)/9600ppr(25 angles)/1600ppr(20 angles) | ||
| General DI/DO Signal | DI(14 points)/DO(10 points) NPN modify definition through parameter | ||
| Brake | Optional(please inform before buying) | ||
| Error History | Maximum storage for 50 error code | ||
| Safety Circuit | Emergency stop switch(servo OFF)Emergency stop switch(servo OFF) | ||
| Communication | USB(virtual COM port):Mini USB/RS485(half duplex):RJ-45/EtherCAT | ||
| LED LED Status Desplay |
PWR: power supply(green)permanent radiating when drive + control power supply input, green flashing when the drive power supply was turned off | ||
| SON: servo(green): permanent radiating when servo ON, extingushed when the error shows | |||
| ERR: error(red); use the times of flashing to decide the error messages. | |||
| Station number setting | Rotating DIP switch (0~f), 16 station | ||