


Integrated Linear Bearings Servo Cylinder - Slider type
CGCH series of servo cylinder is a ball screw driven actuator specially designed for cleanroom applications with integrated Linear Bearings. Its maximum stroke is upto 1000mm and maximum speed is upto 600mm/s. stepper motor is provided along with it as a combine solution. TC100 series controller is used to control its movements by programming. Controller featured with Pulse control mode and EtherCAT for communication control mode.
Features
- Providing +/- 0.005 mm of repeatability
- Ball screw driven with Integrated linear bearings with slider.
- Designed for cleanroom applications.
- Maximum horizontal payload upto 30 kg.
CGCH4 series

CGCH4 series specification
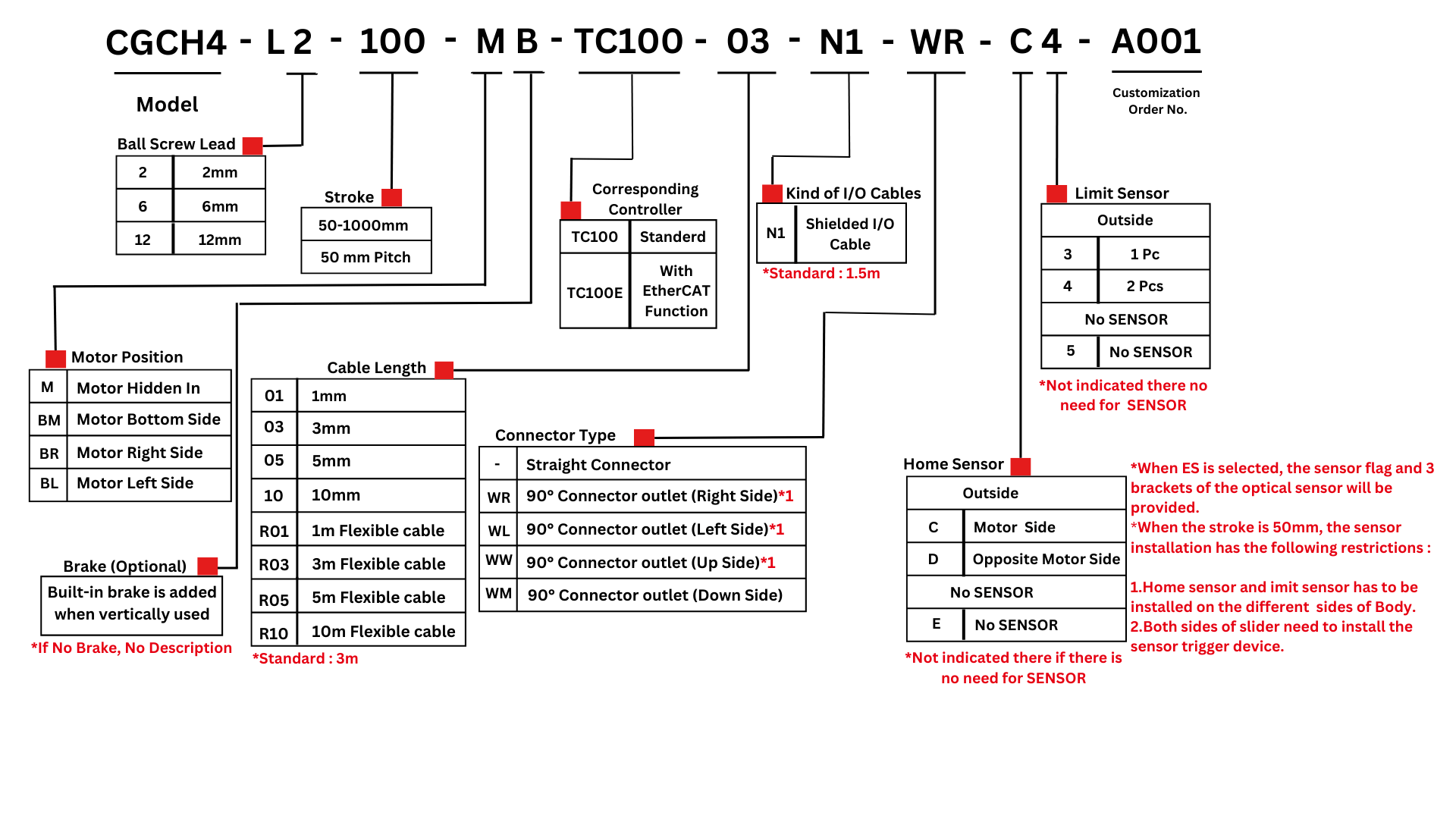
| Specification | Repeatability | mm | ±0.005 | |||
|---|---|---|---|---|---|---|
| Ball Screw Lead | mm | 2 | 6 | 12 | ||
| Minumum Rotating Speed | rpm | ≤3000 | ≤3000 | ≤3000 | ||
| Maximum Speed | Horizontal(kg) | mm/s | ≤100 | ≤300 | ≤600 | |
| Vertical(kg) | mm/s | ≤100 | ≤300 | ≤600 | ||
| Maximum Payload | Horizontal(kg) | mm/s | ≤25 | ≤20 | ≤12 | |
| Vertical(kg) | mm/s | ≤8 | ≤8 | ≤3.5 | ||
| Rated Thurst | N | 1094 | 365 | 182 | ||
| Stroke Increments | mm | 50~1000mm/50 increments | ||||
| Motor Dimension | mm | 35 | ||||
| Ball Screw Spec. | mm | C7 10mm | ||||
| Corresponding Controller Chart | |||
|---|---|---|---|
| Controller Model | Features | Electrical Spec. | |
| TC100 | Pulse Control Mode | Line driver 200k Hz/Open Collector 60k Hz support line driver and open collector Max. pulse receiving speed 200k/60k Hz. |
The voltage of control circuit is 24V only. Operating voltage DC24V, rated current 2A, peak current 3A. Operating voltage:DC48V, rated current 1A, peak current 2A. when the voltage is DC48V but same torque, the rotation speed will be raised. |
| I/O Control Mode | By I/O control, max. 127 positioning points, can be executed | ||
| Communication Control Mode | With Modbus RS-485 or EtherCAT (connect over 16 axes in series) and USB module |
||
| (Optional)with EterCAT, connect over 16 axes can be in series | |||
CGCH5 series

CGCH5 series specification
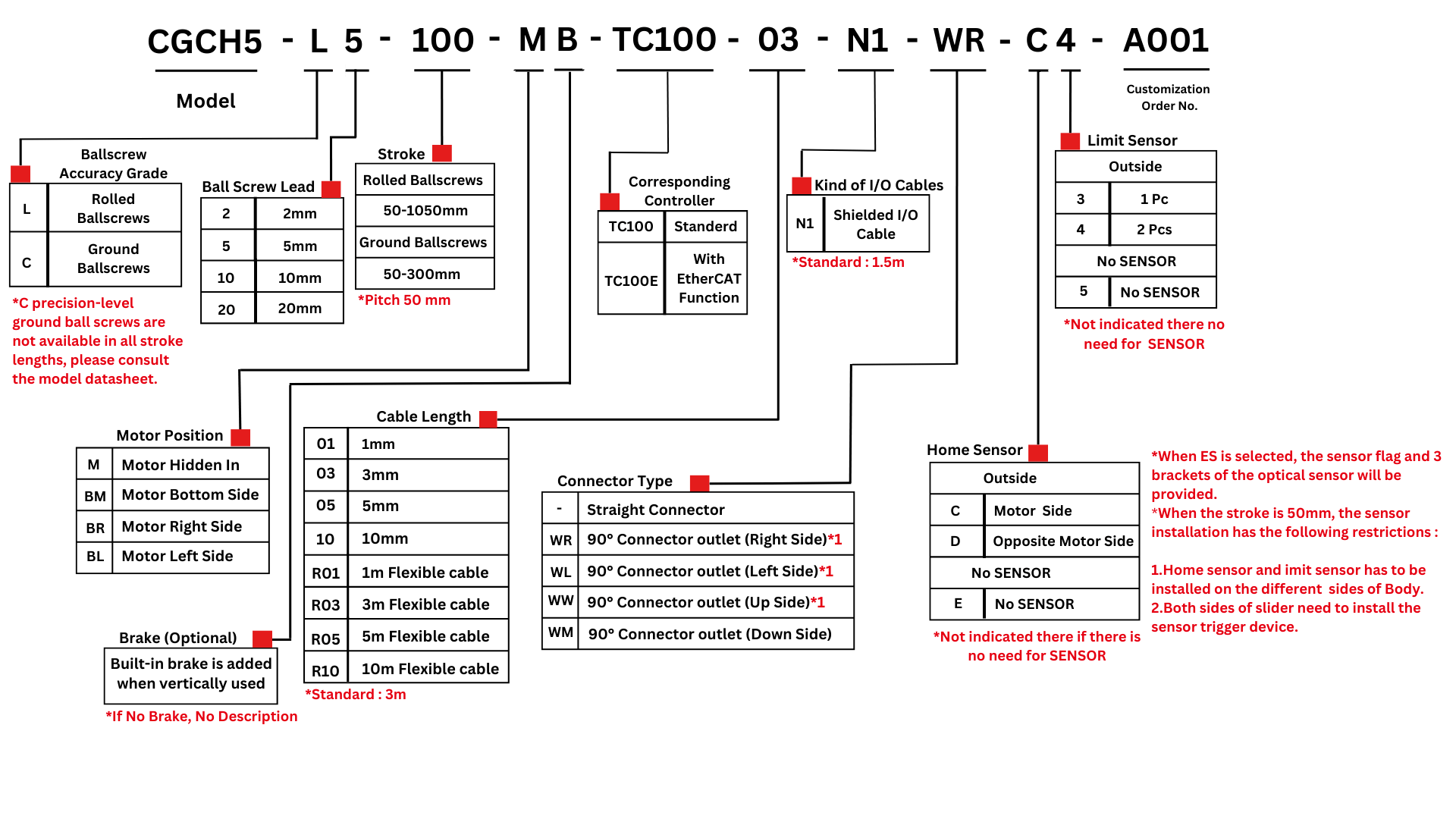
| Specification | Ball Screw Accuracy Grade code | L | C | |||
|---|---|---|---|---|---|---|
| Ball Screw Accuracy Grade | C7 | C5 | ||||
| Repeatability(mm) | ±0.005 | ±0.003 | ||||
| Stroke Pitch(mm) | 50~1050mm/50 increments | 50~300mm/50 increments | ||||
| Ball Screw Lead(mm) | 2 | 5 | 10 | 20 | ||
| Minumum Rotating Speed(rpm) | ≤3000 | ≤3000 | ≤3000 | ≤3000 | ||
| Maximum Speed(mm/s) | Horizontal(kg) | ≤100 | ≤250 | ≤500 | ≤1000 | |
| Vertical(kg) | ≤100 | ≤250 | ≤500 | ≤1000 | ||
| Maximum Payload(Kg) | Horizontal | ≤30 | ≤30 | ≤15 | ≤10 | |
| Vertical(kg) | ≤10 | ≤10 | ≤5 | ≤2.5 | ||
| Rated Thurst(N) | 1147 | 459 | 229 | 155 | ||
| Motor Dimension(mm) | 42 | |||||
| Ball Screw Spec. | ⌀12mm | |||||
| Corresponding Controller Chart | |||
|---|---|---|---|
| Controller Model | Features | Electrical Spec. | |
| TC100 | Pulse Control Mode | Line driver 200k Hz/Open Collector 60k Hz support line driver and open collector Max. pulse receiving speed 200k/60k Hz. |
The voltage of control circuit is 24V only. Operating voltage DC24V, rated current 2A, peak current 3A. Operating voltage:DC48V, rated current 1A, peak current 2A. when the voltage is DC48V but same torque, the rotation speed will be raised. |
| I/O Control Mode | By I/O control, max. 127 positioning points, can be executed | ||
| Communication Control Mode | With Modbus RS-485 or EtherCAT (connect over 16 axes in series) and USB module |
||
| (Optional)with EterCAT, connect over 16 axes can be in series | |||
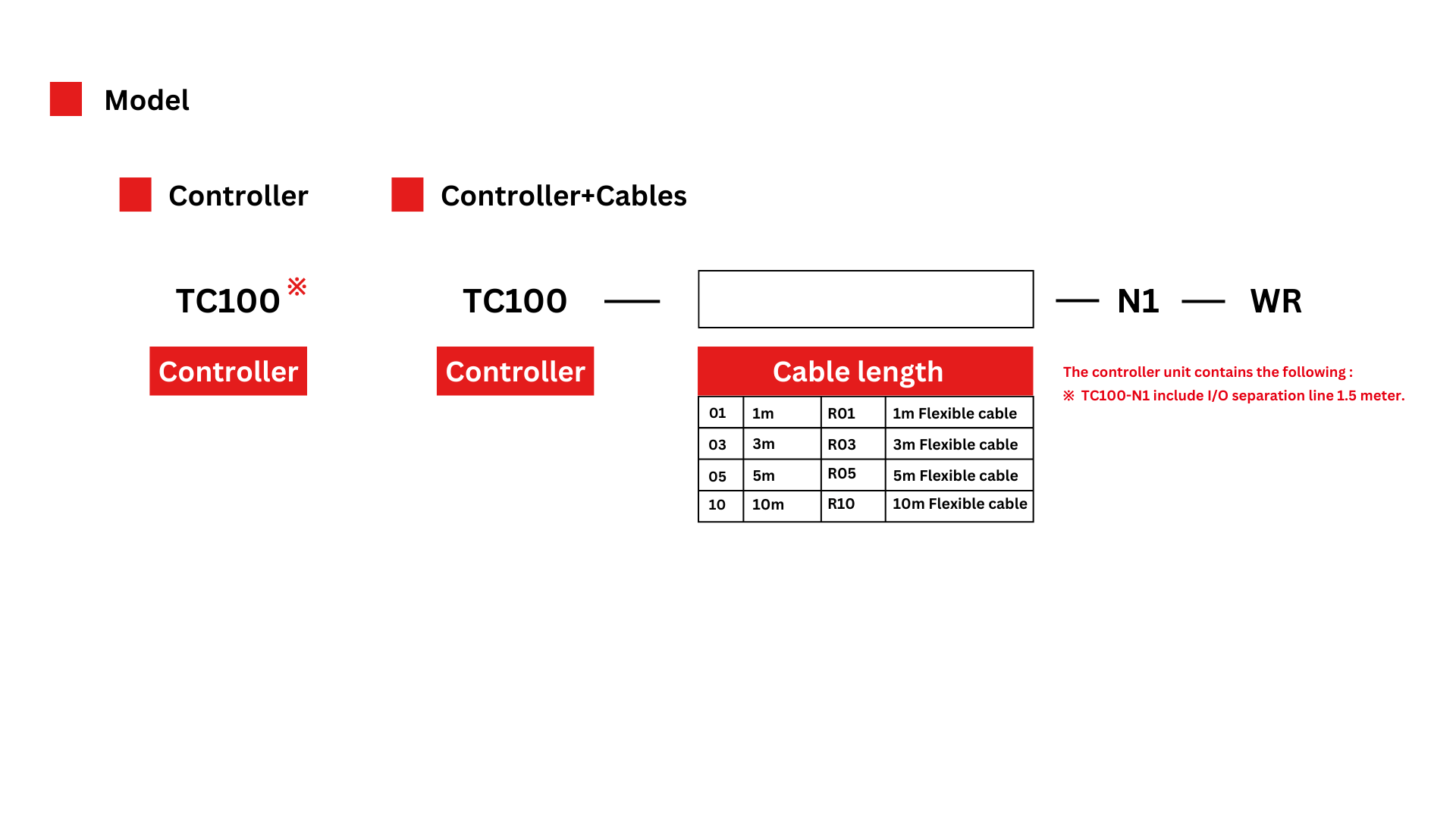
TC100

TC100 Controller specification
| ITEM | Specification | ||
|---|---|---|---|
| Input Power | Control Power | DC 24V(±10%) | |
| Power Supply | DC 24V(±10%)/DC 48V(±10%) | ||
| Number of Controlled Axis | 1 single axis | ||
| Motor | Appropriate Motor | Two phase stepping motor | |
| Dimension | 36` 42` 35` 25` 20 | ||
| Rated Output | 2Ao-p Peak value of sine wave current | ||
| Instant Maximum Output | 3Ao-p Peak value of sine wave current | ||
| Motion Control Mode | ABS Mode | ||
| INC Mode | |||
| INC-R Continuous Mode | |||
| ABS-R Continuous Mode | |||
| TSL Thurst Mode | |||
| Position | Total number of points | 1~127 points | |
| Position Setting Method | Communication setting point position | ||
| I/O point position teaching | |||
| Encoder | Position Mangement | Incremental | |
| Positiion Checking | Optical Rotary Encoder | ||
| Resolution | 16000ppr(56`42 angles)/12800ppr(35 angles)/9600ppr(25 angles)/1600ppr(20 angles) | ||
| General DI/DO Signal | DI(14 points)/DO(10 points) NPN modify definition through parameter | ||
| Brake | Optional(please inform before buying) | ||
| Error History | Maximum storage for 50 error code | ||
| Safety Circuit | Emergency stop switch(servo OFF)Emergency stop switch(servo OFF) | ||
| Communication | USB(virtual COM port):Mini USB/RS485(half duplex):RJ-45/EtherCAT | ||
| LED LED Status Desplay |
PWR: power supply(green)permanent radiating when drive + control power supply input, green flashing when the drive power supply was turned off | ||
| SON: servo(green): permanent radiating when servo ON, extingushed when the error shows | |||
| ERR: error(red); use the times of flashing to decide the error messages. | |||
| Station number setting | Rotating DIP switch (0~f), 16 station | ||